ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ
Укр Рус. Сравнение Добавьте товары для сравнения. Желания Добавьте товары в желания. Перезвонить вам? Укажите ваш номер телефона и имя. Мы свяжемся с вами в ближайшее время.



 | купить в магазине ZABAVKA")






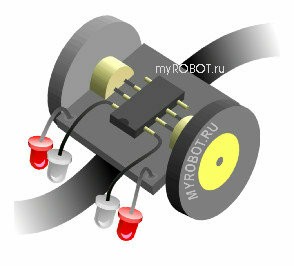
Это рассказ о том, как я сделал своего первого робота, и инструкция чтобы построить его самостоятельно. Игрушка - простой робот двигающийся по обозначенной линии трассе , управляемый двухканальным операционным усилителем. Никаких микроконтроллеров, никакого программирования
- Идеи поделки робот своими руками
- В нашем технологичном мире, где роботы играют все более важную роль, почему бы не создать своего собственного робота?
- Особенность данного устройства заключается в его простоте. Всё, что нужно для управления — это чип и реле.
- Добавить в сравнение. Оставьте заявку.







")






| ПРОСТЫЕ РОБОТЫ — ЭТО СЕРЬЕЗНО | 7 | Поиск Настройки. |
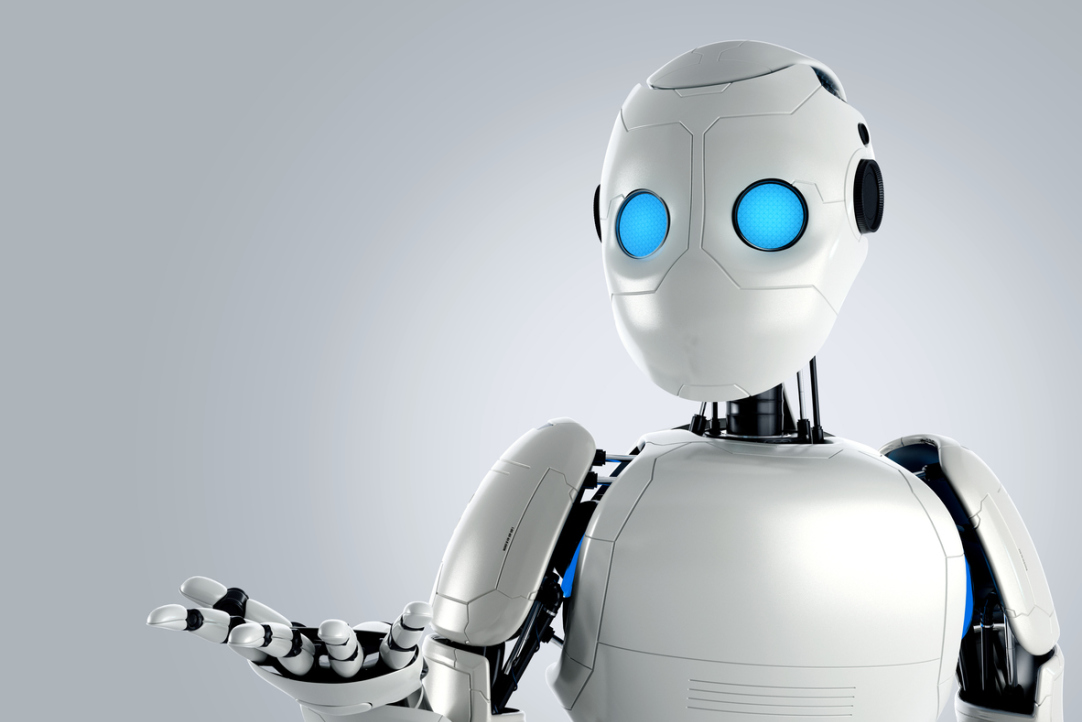
| Благодарности | 362 | Собрать робота андроида — задача, которая может показаться сложной на первый взгляд. Однако, с помощью современных технологий и некоторых базовых навыков, подготовленных инструкций, необходимых материалов и инструментов, этот процесс может быть интересным и увлекательным. |
| Вяжем крючком | 115 | Любому мальчику нравится играть со всяческими роботами. |
| Главное меню | 350 | Роботостроение — увлекательное занятие для настоящих мужчин. |
| Важно! О мелких деталях | 188 | Личный кабинет Регистрация Авторизация. Информация о доставке О нас. |
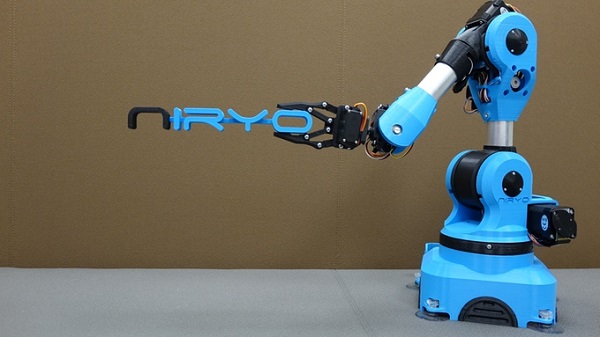
В этой статье, с пошаговой инструкцией по сборке, вы сможете создать робота, объезжающего препятствие, на базе микроконтроллера Arduino , в домашних условиях. Если сенсор обнаружит препятствие, сервопривод позволит избежать столкновения. Сканируя пространство, робот выберет наиболее подходящее направления для объезда.